
Using Large Language Models for Open-World, Interactive, and Personalized Robot Navigation
Robots have come a long way in terms of their ability to interact with users and navigate their surroundings. While traditional approaches have focused on following instructions to find generic object classes, recent advancements in zero-shot object navigation (ZSON) have enabled robots to interact with previously unseen objects and respond to a wide range of prompts. However, these techniques often fall short when it comes to understanding personalized requests and locating specific objects.
To address this limitation, a team of researchers at the University of Michigan has developed a new approach called Zero-shot Interactive Personalized Object Navigation (ZIPON). Their framework, known as Open-woRld Interactive persOnalized Navigation (ORION), utilizes large language models (LLMs) to enhance a robot’s ability to respond to user requests and locate specific nearby objects.
The ZIPON Task
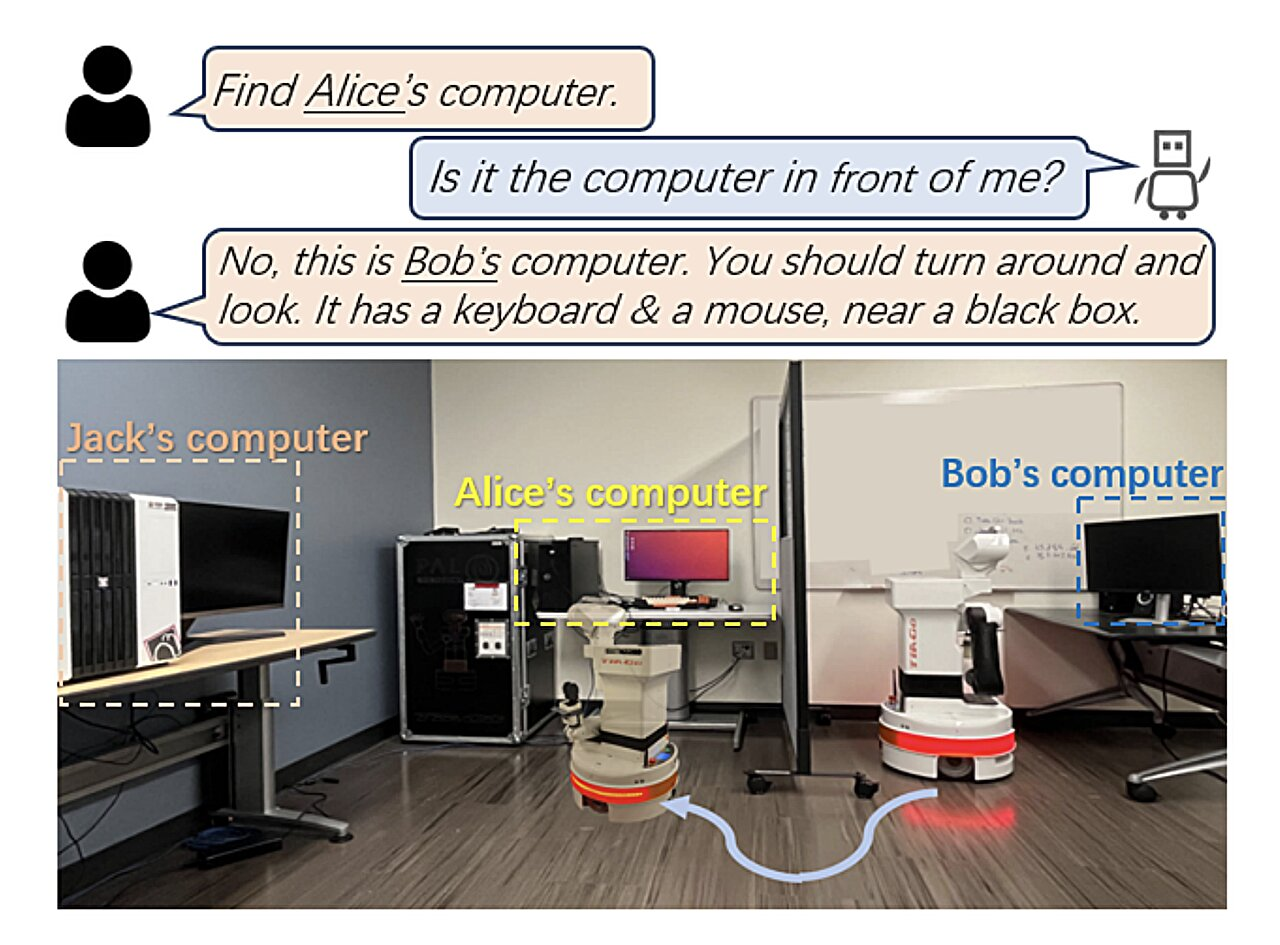
ZIPON is a generalized form of ZSON that requires robots to accurately respond to personalized prompts and locate specific target objects. While traditional ZSON tasks may involve finding a nearby bed or chair, ZIPON takes it a step further by asking robots to identify a specific person’s bed or a chair purchased from Amazon, for example.
To tackle the ZIPON task, the researchers propose the ORION framework, which leverages LLMs to make sequential decisions and manipulate different modules for perception, navigation, and communication. The framework consists of six key modules: control, semantic map, open-vocabulary detection, exploration, memory, and interaction.
The ORION Framework
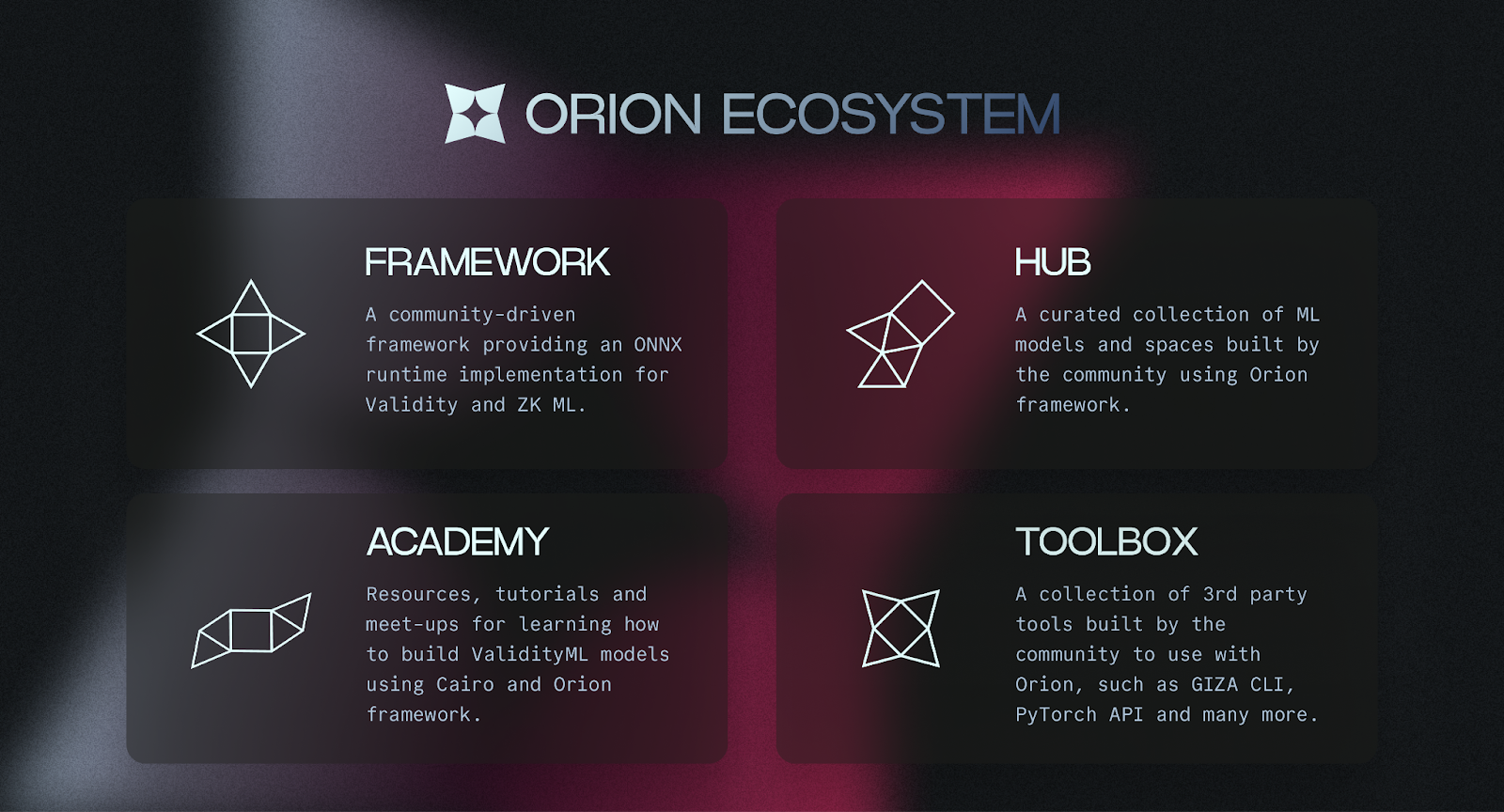
The control module allows the robot to move around in its surroundings, while the semantic map module indexes natural language. The open-vocabulary detection module enables the robot to detect objects based on language-based descriptions. The exploration module helps the robot search for objects in its environment, while the memory module stores important information and feedback received from users. Finally, the interaction module allows the robot to verbally respond to user requests.
The researchers evaluated the ORION framework through simulations and real-world experiments using TIAGo, a mobile wheeled robot with two arms. Their findings showed promising results, as the framework improved the robot’s ability to utilize user feedback when locating specific nearby objects. However, they also highlighted the challenges of simultaneously ensuring task completion, efficient navigation, and effective interaction with users.
Future Directions

While the ORION framework shows potential for enhancing personalized robot navigation in unknown environments, the researchers acknowledge its limitations and the need for further improvements. For instance, the framework does not handle broader goal types like image goals or address multi-modal interactions with users in the real world. Future efforts will focus on expanding the adaptability and versatility of interactive robots in the human world.
In conclusion, the use of large language models in open-world, interactive, and personalized robot navigation represents an exciting advancement in the field of robotics. The ZIPON task and the ORION framework provide a foundation for robots to understand personalized requests, locate specific objects, and effectively interact with users. As researchers continue to refine these techniques and address their limitations, we can expect to see even more intelligent and responsive robots in the future.