A New Optimization Framework for Robot Motion Planning
Introduction
The field of robotics has made tremendous advancements in recent years, with robots being deployed in various domains such as manufacturing, warehousing, and household tasks. However, one of the challenges that robots face is efficient and collision-free motion planning in complex environments. Traditional approaches often rely on pre-computed graphs of fixed configurations, leading to suboptimal and inefficient movements. To address this issue, researchers from MIT’s Computer Science and Artificial Intelligence Lab (CSAIL) have developed a groundbreaking optimization framework called Graphs of Convex Sets (GCS) Trajectory Optimization. This algorithm combines graph search and convex optimization techniques to enable robots to navigate maze-like environments while simultaneously optimizing their trajectories. In this article, we will explore the key features and potential applications of this new optimization framework.
The Need for Efficient Robot Motion Planning

Robots excel at repetitive, pre-planned motions in controlled environments such as automotive manufacturing or electronics assembly. However, they often struggle with real-time motion generation in novel environments or tasks. Traditional motion planning methods rely on pre-computed graphs of fixed configurations, which limit the robot’s ability to adapt to different scenarios. These approaches can be inefficient and prone to collisions in complex environments. To overcome these limitations, the researchers at MIT CSAIL developed the GCS Trajectory Optimization algorithm, which enables robots to dynamically plan their motions while ensuring collision-free navigation.
The Marriage of Graph Search and Convex Optimization
The GCS algorithm combines two key ingredients: graph search and convex optimization. Graph search is a method used to find discrete paths in a network, similar to how Google Maps calculates distances between locations. Convex optimization, on the other hand, is an efficient technique for minimizing costs and optimizing continuous variables. By leveraging both techniques, GCS can find optimal paths through intricate environments while simultaneously optimizing the robot’s trajectory.
The algorithm starts by creating a graph of different points in the robot’s surrounding area. It then uses graph search to explore these points and calculate various properties at each one. This process helps identify hidden patterns and determine the shortest path to reach the target. By incorporating convex optimization, GCS ensures that the trajectory accounts for different angles and avoids collisions with obstacles. This dynamic motion plan enables robots to navigate through complex environments, similar to how a skilled driver maneuvers through narrow streets.
Scalability and Multidimensional Planning

One of the key strengths of the GCS algorithm is its scalability and ability to handle high-dimensional spaces. Traditional sampling-based algorithms struggle in such environments, making them impractical for real-world robotic applications. GCS, however, can map out collision-free trajectories in as many as 14 dimensions and potentially more. This capability opens up new possibilities for multi-robot coordination in warehouses, libraries, and households.
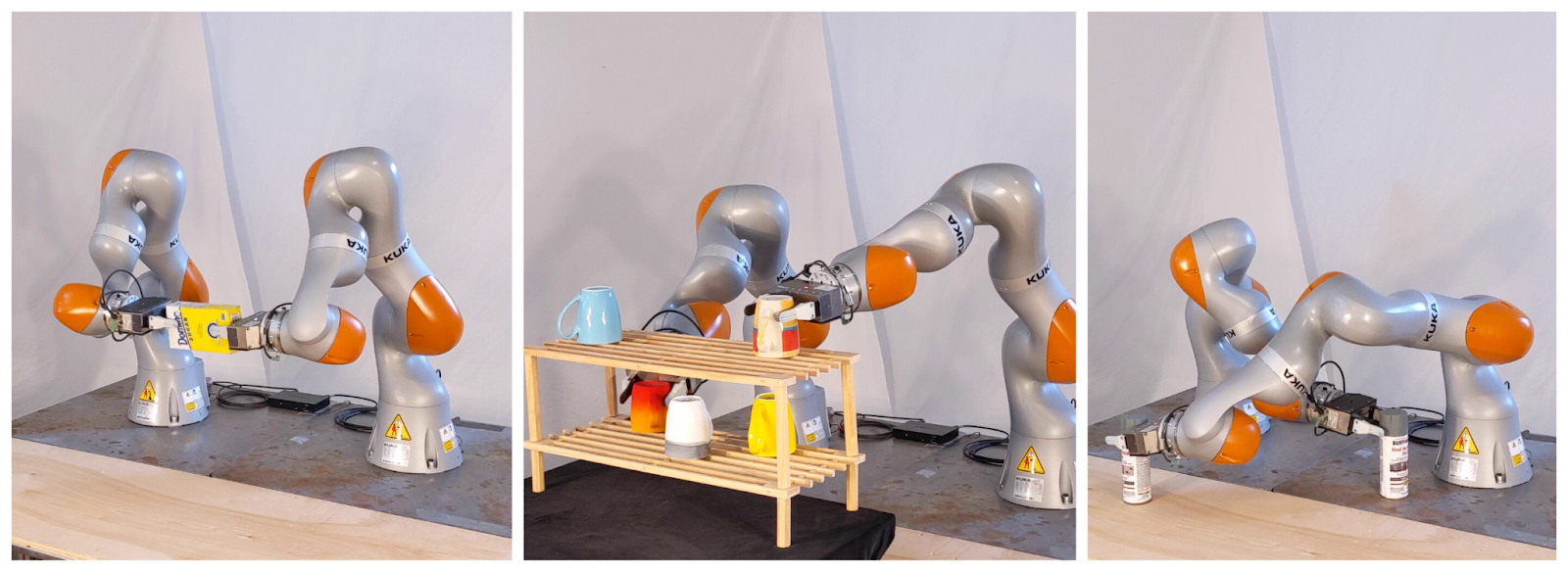
In demonstrations, the GCS algorithm showcased its efficiency and adaptability. The researchers conducted experiments where two robotic arms, holding a mug, skillfully navigated around a shelf while optimizing for the shortest time and path. The synchronized motion of the arms resembled a partner dance routine, showcasing the algorithm’s ability to coordinate the movements of multiple robots. In subsequent setups, the researchers removed the shelves and simulated scenarios where the robots exchanged positions of objects or handed each other items. These real-world tests demonstrated the algorithm’s potential in domains like manufacturing, household tasks, and libraries, where robots can collaborate in complex environments.
Advantages over Traditional Approaches
Compared to traditional motion planning methods, the GCS algorithm offers several advantages. Traditional approaches often rely on pre-computed graphs with fixed configurations, which limit the robot’s ability to adapt to different scenarios. In contrast, GCS allows robots to easily adapt to different configurations within pre-computed convex regions. This flexibility enables the robot to “round the corner” and make rapid and efficient plans within safe regions using convex optimization. Consequently, the robot can dynamically adjust its trajectory based on the environment, leading to more efficient and adaptable motion planning.
Applications of GCS Trajectory Optimization
The GCS algorithm has the potential to revolutionize various domains where robots are deployed. In manufacturing, where two robotic arms often work in tandem, the algorithm can improve coordination and efficiency. For example, two robotic arms can collaborate to bring down an item from a shelf, avoiding obstacles and other objects nearby. Similarly, in household or library settings, robots can assist in tasks like putting away books, considering the presence of other objects in the environment.
The GCS algorithm is not limited to a specific type of robot or environment. It can be applied to various robotic systems, including quadrotors. In simulation demos, the researchers explored how a quadrotor could navigate through a building without colliding with trees or failing to enter doors and windows at the correct angle. The algorithm optimized the path around obstacles while considering the rich dynamics of the quadrotor. This showcases the algorithm’s potential in aerial robotics and autonomous navigation.
Future Directions and Further Improvements
While the GCS algorithm has demonstrated impressive capabilities, there is still room for further development and improvement. The researchers acknowledge that the algorithm’s current focus is on navigating tight spaces without collisions. However, there are more complex scenarios where robots need to interact with their environment, such as pushing or sliding objects out of the way. Future research aims to extend the GCS framework to handle such scenarios and enable robots to perform more intricate tasks.
The GCS algorithm is deeply connected to core results in optimization, control, and machine learning. This connection opens up new avenues for research and potential enhancements to the algorithm. The researchers are excited about the future applications of GCS in motion planning and its potential to enhance the speed, efficiency, and adaptability of robot motions in novel environments.
Conclusion
The Graphs of Convex Sets (GCS) Trajectory Optimization algorithm developed by MIT CSAIL researchers offers a groundbreaking approach to robot motion planning. By combining graph search and convex optimization techniques, the algorithm enables robots to efficiently navigate complex environments while optimizing their trajectories. The algorithm’s scalability and multidimensional planning capabilities make it suitable for various applications, ranging from manufacturing to household tasks. While the algorithm has already demonstrated impressive results, ongoing research aims to expand its capabilities and handle more complex scenarios. With the GCS algorithm, the future of robot motion planning looks promising, advancing the field of robotics and enabling robots to navigate and interact effectively in real-world environments.